|
Chapter 4: Digital Multimeter
This chapter describes features of the multimeter. At the end of the chapter, three actual
meter advertisements are compared. Digital multimeters are so important to robotics, that
subsequent chapters provide illustrated, step-by-step instructions for using a multimeter
in each stage of building and testing a robot.

Chapter 5: Numbers and Units
Have you ever wondered about the numbering scheme of certain parts? This chapter details
some common measurement units and methods of labeling small parts.
Chapter 6: Robot Line-Following
This chapter introduces Sandwich, the line-following robot. A detailed tour is made of the
features, dials, and switches on Sandwich. You, too, can build this cool and capable
robot!

Chapter 7: Nine-Volt Batteries
Nine-volt batteries are quite popular with smaller, lunchbox-size robots. A comparison of
common battery chemistries is made, along with revealing the manufacturer that stuffs
their battery with polystyrene foam. The shock! The horror!

Chapter 8: Clips and Test Leads
No legitimate robot designer should be without a few pairs of alligator clips and hook
test leads. Here you'll learn how to test them with the continuity mode on a multimeter.
Chapter 9: Resistors
This chapter describes the function of a resistor, in plain, simple terms. Step-by-step
instructions are provided to test a resistor in the ohm-mode of a multimeter.

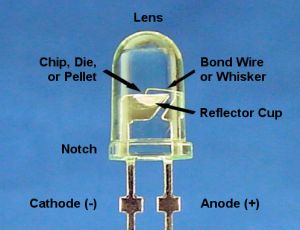
Chapter 10: LEDs
You'll learn about the different selection criteria for LEDs, including the brightness
myth. And of course, you'll see how to test LEDs.
Chapter 11: Power On!
At this point in the book, you have everything you need to make a power-indicator circuit.
A simple schematic is included, with a complete explanation of each element.
Chapter 12: Solderless Prototyping
Prototyping a circuit is a must. The process is painless with a solderless breadboard.
Also covered in this chapter are: wire strippers, solid wire, jumpers, and pliers.

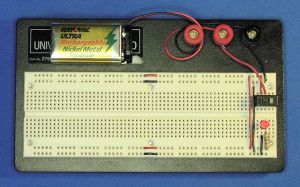
Chapter 13: Solderless Breadboard Setup
A good setup for your breadboard is to connect a rechargeable 9 V battery and a switch,
extend the buses, and add a power indicator. This chapter shows you how to do it, along
with methods of testing voltages throughout the board with a multimeter.
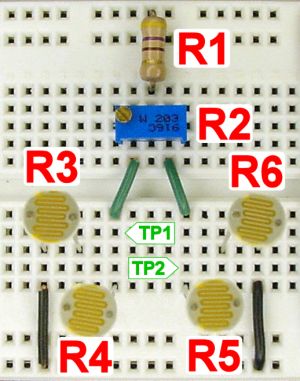
Chapter 14: Variable Resistors
Now that you've prepared your breadboard, you can start experimenting with circuits that
are too complicated for alligator clips. This chapter details variable resistors, such as
fine-tuning potentiometers and photoresistor sensors. Each circuit described in this book
is first shown in schematic (or wire diagram) form and then illustrated on an actual
breadboard.
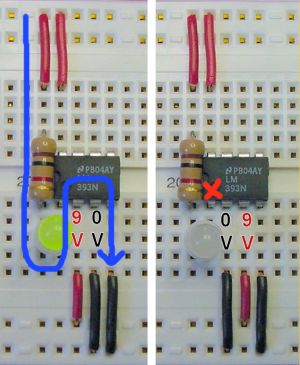
Chapter 15: Comparators
A comparator is a really useful chip. Often it is a supplemental component used to
preprocess sensor data for a microcontroller on a robot. In this case, the comparator is
the brain of the line-following robot.
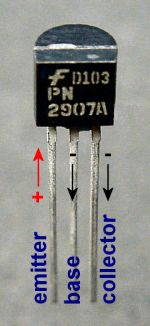
Chapter 16: Transistor Switches
A working knowledge of transistors is necessary to drive robot motors. Instructions to
test a transistor are covered, as well as NPN and PNP bipolar test circuits you can build
if your multimeter doesn't have a transistor test socket.
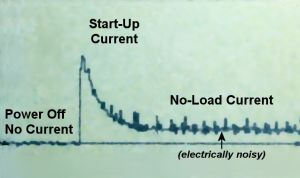
Chapter 17: DC Motors
What robot book would be complete without a close look at DC motors? Possibly the longest
chapter in the book, it lists the many characteristics of motors and how you might go
about selecting the proper motors for your robot. A table provides formulas for converting
between different units of rotational force (torque). Learn about the significance and
phases of motor current usage.Gears, gearhead motors, and gear ratios are also described.
Chapter 18: Adding Gearhead Motors
In this chapter, a particular gearhead motor is selected for the line-following robot.
Additionally, flyback diodes are added for the protection of the transistors.

Chapter 19: Wheels
From motors, we move on to wheels. The type of wheel makes a bigger difference to a robot
than most people think. This chapter describes some of the factors to consider.

Chapter 20: Coupler
If you're fortunate enough to find a matching set of wheels and motors suitable for your
robot, then attaching the wheel to the motor shaft isn't a problem. Usually though,
there's a part, called a coupler, that's needed to connect the wheel to the motor. You'll
learn the simple secrets to making a coupler yourself. And, as always, step-by-step
instructions are provided.
Chapter 21: Soldering Equipment
You can only proceed so far in robot building without soldering. Although it can seem
intimidating, it's easy with a little practice and encouragement. This chapter describes
some popular soldering tools and supplies, such as a soldering iron, stand, sponge,
desoldering bulb, flux, and (of course) solder.
Chapter 22: Soldering and Connecting
You won't want to solder everything together on your robot. In fact, some parts are best
left to removable connectors. This chapter describes the Molex KK-series connector, along
with the pieces and tool you need to attach connectors to your robot. This chapter also
begins the soldering process for the line-following robot. Heat-shrink tubing, the
hallmark of a professional, is also discussed.
Chapter 23: The Motherboard
The soldering section finishes with the complete schematic of the line-following robot.
The choice of point-to-point wiring versus printed-circuit boards is covered, as well as
expert tips for successful soldering.
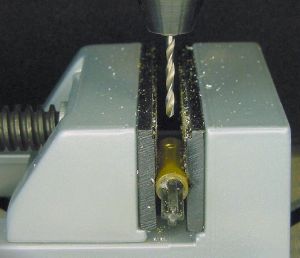
Chapter 24: Body Building
Few designers put enough time into selecting or making their robot's body. This chapter
discloses a timesaving, yet uncompromising, body material. An easy technique for cutting
holes in plastic is explained. Also discussed: standoffs, screws, nuts, washers,
nutdrivers, switch hardware, and acetone.
Chapter 25: Launching the Line-Follower
Tweaking and adjusting often make the biggest difference between an ordinary robot and a
great robot. This chapter describes simple trials for your line-following robot to
complete, and possible corrections if your robot doesn't match the behaviors and values
listed in the book. Frame by frame analysis shows how the line-following robot is able to
follow both light and dark lines. The limiting factors are revealed, as well as
interesting ideas for enhancements.

Chapter 26: Encore
Where do you go from here? There are lots of interesting, but more complicated, robotic
components that can be used for more advanced robots. This chapter describes some of the
parts you may want to use on your next robot. This chapter also discusses some wacky
project ideas and some of the autonomous-robot contests held throughout the United States.
Appendix:
The book ends with a discussion of Ohm's Law.
|
