Advertise your product on RobotBooks.com
Beginners Books |
Hobby Robots |
Robot Sports |
Electronics |
Mechanics |
Robot Minds |
Robot Fiction
Books for Kids |
Robots at Work |
Mars Robotics |
Advanced Books |
Recommended |
Roboxers |
Robot Kits
Solar Kits |
Robot Arms |
Robosapien |
Basic Stamp |
BioHazard |
Robot Toys |
Muscle Wires |
Lego Mindstorms
Real Robots |
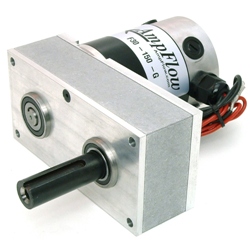
Robot Motors |
Robot Tools |
Microcontrollers |
Used Books |
Robot Parts |
Magazines |
Holdem
Robot Videos |
Robot News |
RoboLinks |
Contact